/ / INTRODUCTION
This bot follows a black line on a white surface.
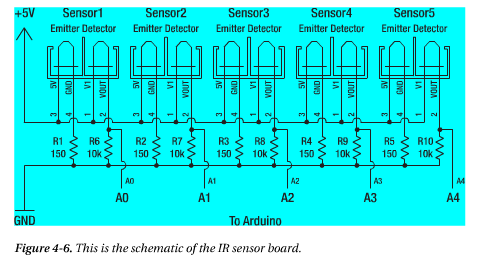
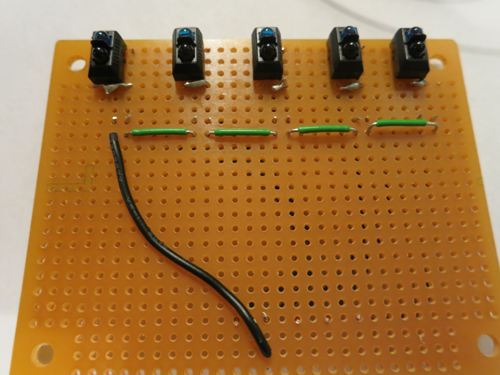
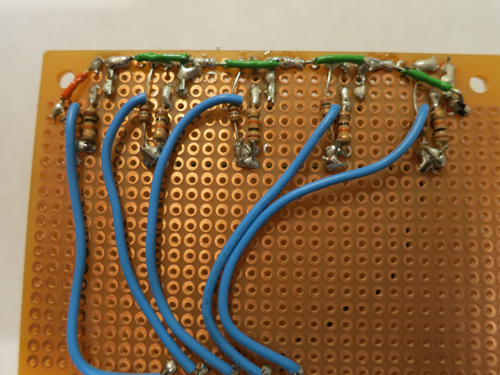
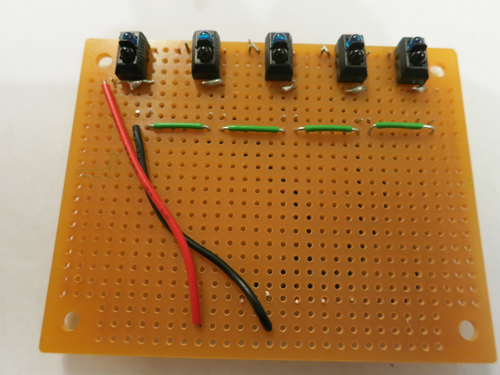
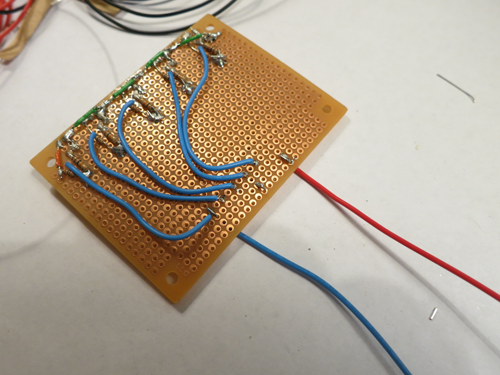
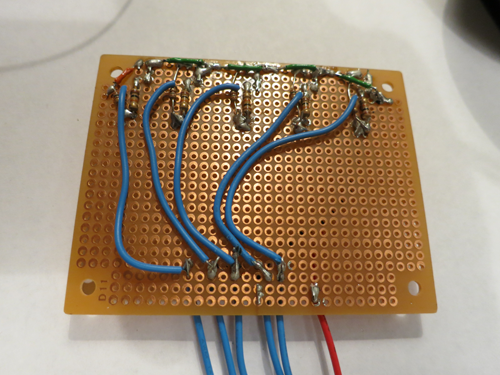
The infrared emitter sends a continuous beam of infrared light that is reflected from the ground back to the infrared detector. The detector is an infrared photo-transistor that uses infrared light to activate the transistor base. the more infrared light that gets to the detector, the more the transistor conducts. By using 5 IR sensors in a line, the arduino can determine the exact position of the non-reflective (black) line underneath the robot. The arduino continually adjusts the motors based on the sensors readings to keep the bot on the line.
Parts
- Arduino
- Makerbotted base
- Makerbotted servo holders
- Makerbotted caster wheel
- Makerbotted battery clip
- Makerbotted wheels
- Protoshield
- 2 continuous rotation servo motors
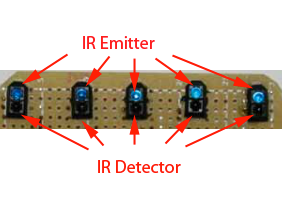
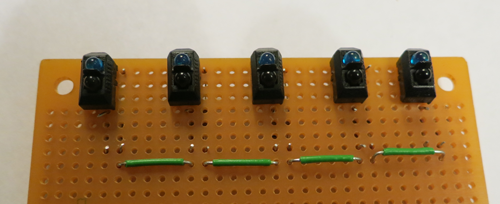
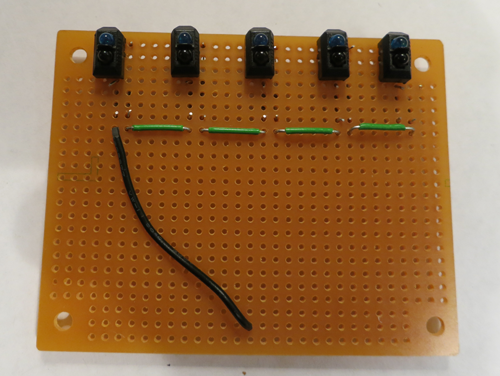
- 5 IR emitter/detectors
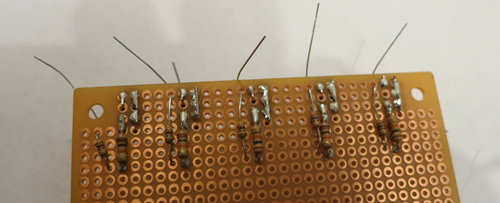
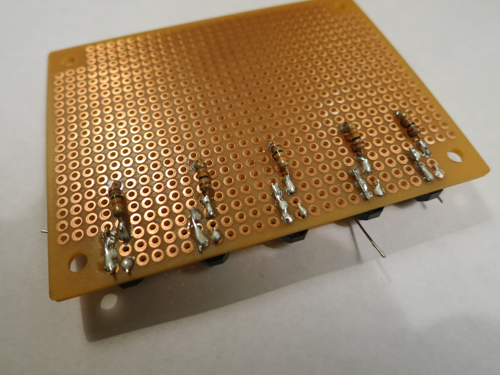
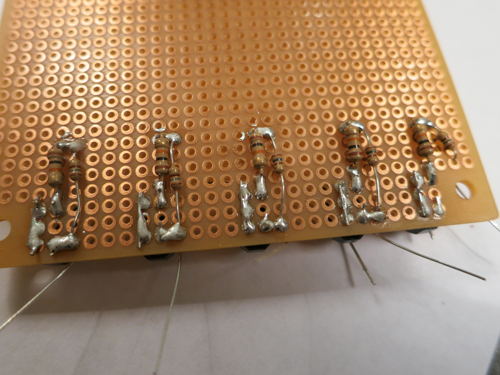
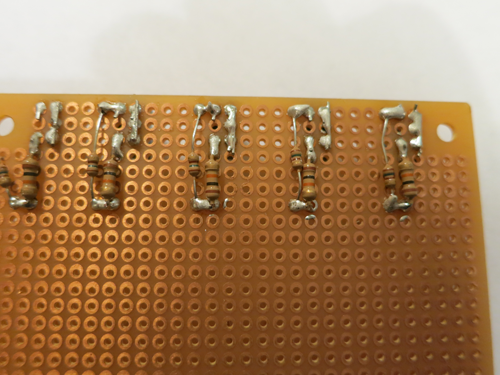
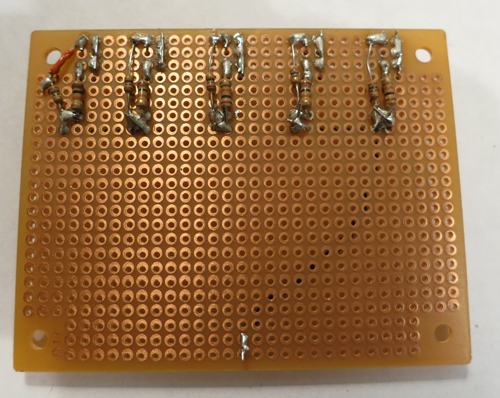
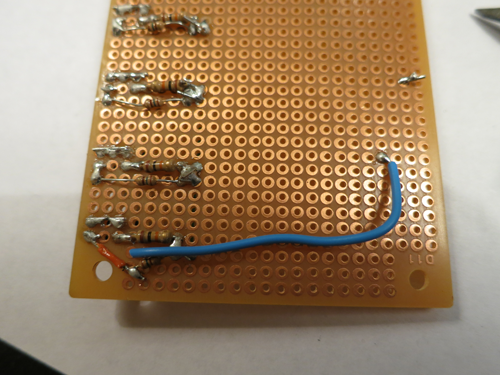
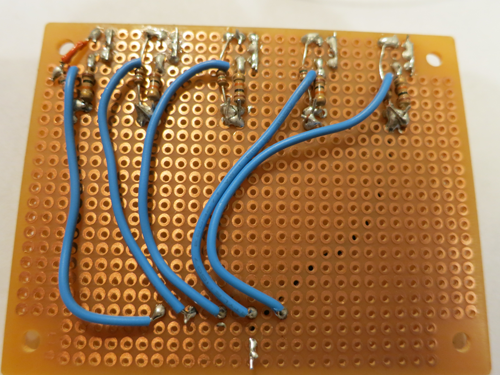
- perforated prototyping board
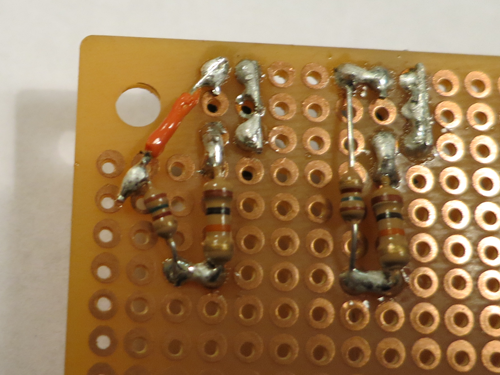
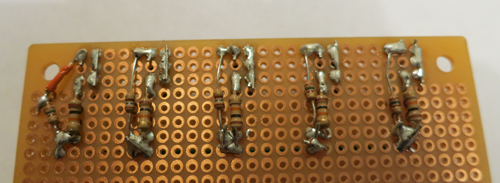
- 5 10k resistors
- 5 150Ω resistors
- nuts and bolts
- 1/2 inch chrome ball
- 9 Volt battery
- 2 rubber bands
- SPST toggle switch